



Руководство пользователя FE35FB-01000
Данное руководство подходит для лазерного сканирующего датчика FE35FB-01000.
Автор: Hinson Версия выпуска: V1.00 Время обновления: 2024.10.16
1. Важные вопросы безопасности
1.1 Замечания по применимой среде
 Пар, дым, пыль и видимые частицы в воздухе могут привести к неверным показаниям датчика или даже к его выходу из строя.
Пар, дым, пыль и видимые частицы в воздухе могут привести к неверным показаниям датчика или даже к его выходу из строя.
Квалифицированные специалисты должны регулярно проверять правильность подключения и установки датчика.
Максимальный срок службы датчика составляет 10 лет; после этого его необходимо заменить, иначе он может не соответствовать требуемым стандартам производительности.
Датчик следует регулярно проверять и чистить.
Это изделие разрешено использовать только в указанных пределах и при заданных технических параметрах и условиях эксплуатации.
1.2 Замечания по среде подключения
 Не меняйте полярность источника питания и не подключайте его к напряжению выше указанного максимального рабочего напряжения, так как это может повредить датчик.
Не меняйте полярность источника питания и не подключайте его к напряжению выше указанного максимального рабочего напряжения, так как это может повредить датчик.
Подключение источника питания ниже указанного минимального рабочего напряжения приведет к неисправности датчика или его ненормальной работе.
Пожалуйста, следуйте инструкциям руководства по подключению; в противном случае датчик может некорректно распознавать входной сигнал.
Не превышайте допустимую нагрузку датчика при подключении устройств к выходному сигналу, так как это может привести к выходу датчика из строя.
1.3 Замечания по среде отладки
Подключать, устанавливать, отлаживать и настраивать лазерный датчик разрешено только квалифицированному авторизованному персоналу.
Убедитесь, что периферийные устройства, связанные с датчиком, находятся в надежно выключенном состоянии.
Убедитесь, что персонал, проводящий отладку, находится в безопасном месте.
Убедитесь, что другой персонал или предметы находятся за пределами активной зоны действия оборудования.
| Производительность | |
Дальность обнаружения |
0,05 м-8 м (@ коэффициент отражения 2%) 0,05 м-35 м (@ коэффициент отражения 90%) |
Угол обнаружения |
312° |
Частота измерений |
540Khz |
Метод измерения |
Технология импульсной локации (PRT) |
Частота сканирования |
12,5 Гц: 750 об/мин (0,025°, 0,05°, 0,1°, 0,25°, 0,5° разрешение по углу) 25,0 Гц: 1500 об/мин (0,05°, 0,1°, 0,25°, 0,5° разрешение по углу) |
Распознавание формы объекта |
Любая форма, разрешение рассчитывается на основе расстояния обнаружения |
Разрешение измерения |
1mm |
Абсолютная точность |
±10 мм |
Шум измерения |
±20 мм |
| Интерфейс | |
Входной сигнал |
4*NPN |
Выходной сигнал |
4*NPN |
CAN |
Can-шина CAN OPEN *1 |
Ethernet |
TCP/IP (TCP-сервер, UDP) 100 Мбит/с |
Количество эхо-сигналов |
3 |
Вывод необработанных данных измерений |
Поддерживается |
Количество зон защиты |
3 |
Количество каналов предотвращения столкновений |
64 |
| Mechanical/Electrical | |
Рабочее напряжение |
DC10~30 В |
Рабочий ток |
125-150mA |
Потребляемая мощность |
< 3,4 Вт |
Длина волны источника света |
905nm |
Класс лазера |
Класс 1 (IEC 60825-1:2014) |
Индикатор |
4*светодиода (рабочий индикатор - зеленый, индикатор состояния выхода - желтый, оранжевый, красный) |
Материал |
Алюминиевый сплав, PMMA |
Класс защиты |
IP65 |
1 |
Лазерный датчик FE |
1 unit |
2 |
Программное обеспечение для настройки Hinson |
1 set |
3 |
Сертификат соответствия датчика |
1 piece |
Программные инструменты |
Версия программного обеспечения Hinson 1.5.2 или выше |
1 set |
Блок питания |
Блок питания DC24 В |
1 piece |
Инструменты |
Конфигурация компьютера имеет порт RJ45 (или получен путем преобразования) |
1 piece |
Серийный номер |
Описание функции | Примечания |
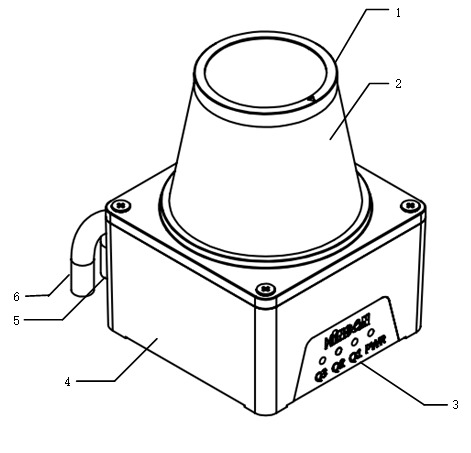
1 |
Верхняя крышка | Указывает диапазон сканирования и положение угла |
2 |
Окно обнаружения датчика | Окно обнаружения датчика |
3 |
Индикатор | Отображение рабочего состояния |
4 |
Основание | Положение монтажных отверстий |
5 |
Выходная линия 1 | Подключение кабеля Ethernet |
6 |
Выходная линия 2 | Подключение линии питания и сигналов ввода-вывода |
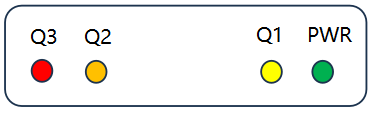
4.3 Описание индикаторных ламп
Идентификация |
Дисплей |
Описание функции | Инструкция по эксплуатации |
PWR |
Зеленый |
Индикаторная лампа рабочего состояния | Зеленый индикатор Выкл.: Датчик не подключен к питанию или работает неправильно; Вкл.: Датчик работает нормально; Мигает: Датчик обнаружил внутреннюю неисправность, прекратил работу; |
Q1 |
Желтый |
Индикаторная лампа выхода OUT1 | Желтый индикатор Выкл.: Датчик не подключен к питанию, объект не обнаружен; Вкл.: Обнаружен вторгающийся объект; Мигает: Датчик обнаруживает фронт сигнала; |
Q2 |
Оранжевый |
Индикаторная лампа выхода OUT2 | Оранжевый индикатор Выкл.: Датчик не подключен к питанию, объект не обнаружен; Вкл.: Обнаружен вторгающийся объект; Мигает: Датчик обнаруживает фронт сигнала; |
Q3 |
Красный |
Индикаторная лампа выхода OUT3 | Красный индикатор Выкл.: Датчик не подключен к питанию, объект не обнаружен; Вкл.: Обнаружен вторгающийся объект; Мигает: Датчик обнаруживает фронт сигнала; |
|
|
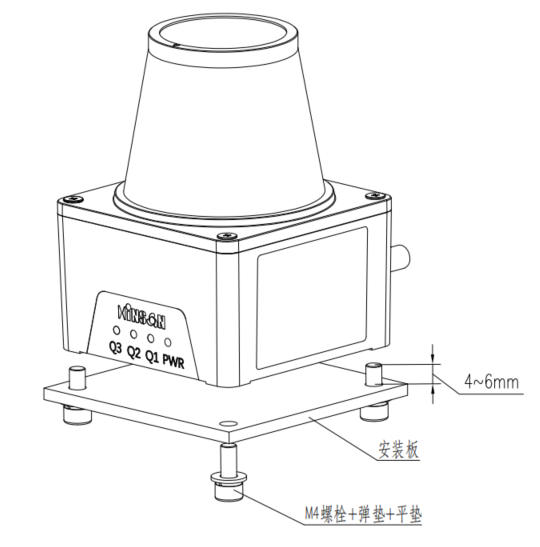
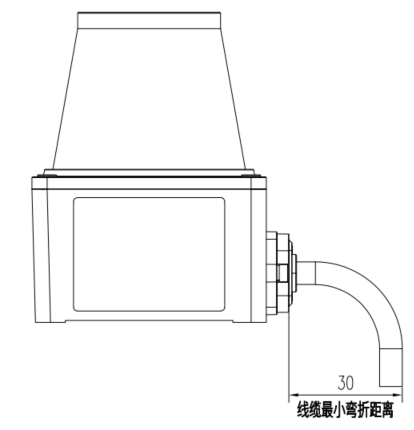
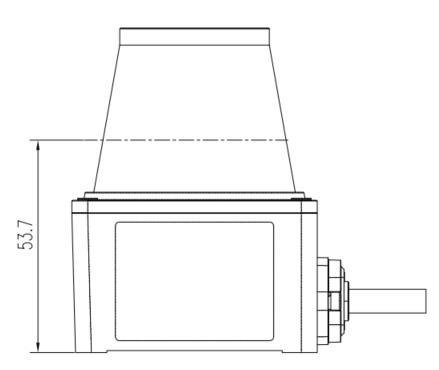
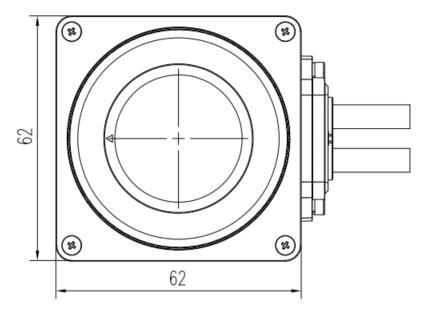
Крепежные винты должны иметь пружинные шайбы во избежание ослабления |
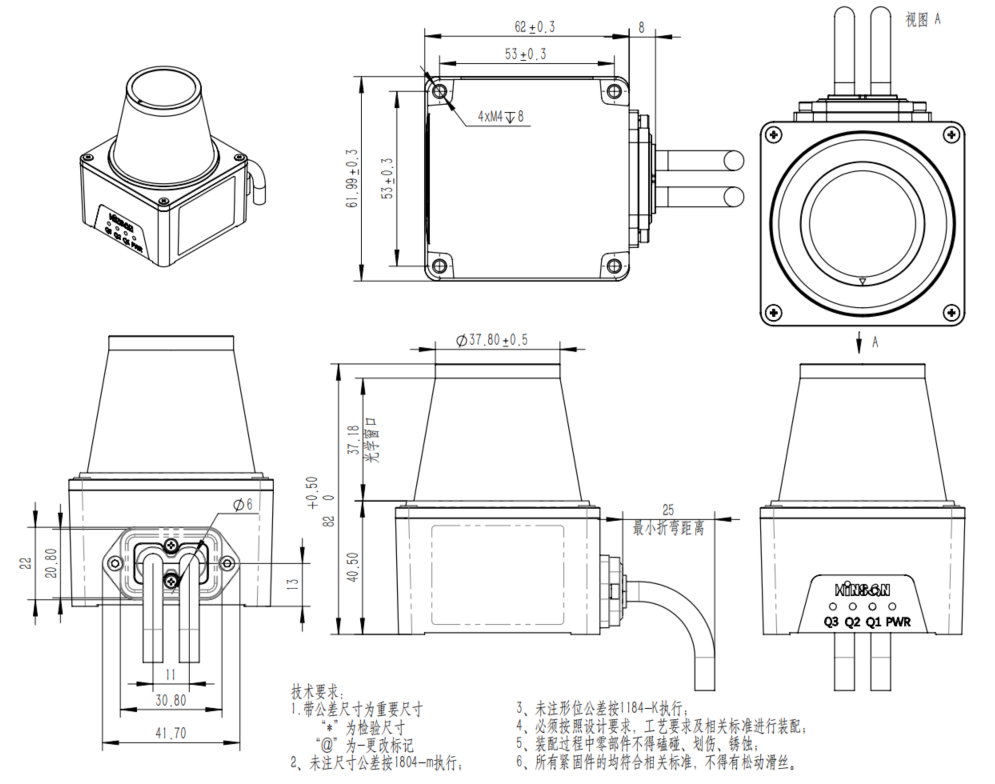
Зарезервируйте 30 мм пространства сзади для кабелей |
5.1 Порты питания и количества переключателей
| Функция | Ввод-вывод, блок питания, связь Ethernet |
| Тип | Провода |
| Технические характеристики клемм | RJ45, FT10001-F2H |
| Количество контактов | 14 pins |
| Метод вывода | Прямой вывод |
Клемма |
Серийный номер |
Символ |
Цвет |
Функция |
CN3 |
Pin1 |
+VIN |
Коричневый |
Положительный вход питания |
Pin2 |
-VIN |
Синий |
Отрицательный вход питания | |
Pin3 |
XCOM |
Brown-white |
Входная общая клемма | |
Pin4 |
IN1 |
Черный |
Вход ввода-вывода 1 | |
Pin5 |
IN2 |
Оранжевый |
Вход ввода-вывода 2 | |
Pin6 |
IN3 |
Желтый |
Вход ввода-вывода 3 | |
Pin7 |
CAN_L |
Зеленый |
CAN_L | |
Pin8 |
CAN_H |
Фиолетовый |
CAN_H | |
Pin9 |
IN4 |
Серый |
Вход ввода-вывода 4 | |
Pin10 |
YCOM |
Белый |
Выходная общая клемма | |
Pin11 |
OUT1 |
White-green |
Выход ввода-вывода 1 | |
Pin12 |
OUT2 |
White-blue |
Выход ввода-вывода 2 | |
Контакт 13 |
OUT 3 |
Красный |
Выход ввода-вывода 3 | |
Контакт 14 |
OUT 4 |
Бело-красный |
Выход ввода-вывода 4 |
Клемма |
Серийный номер |
Символ |
Цвет |
Функция |
CN2 |
Pin1 |
ETH TX+ |
Красно-белый |
Выход Ethernet + |
Pin2 |
ETH TX- |
Красный |
Выход Ethernet - | |
Pin3 |
ETH RX+ |
Бело-зеленый |
Вход Ethernet + | |
Pin4 |
ETH RX- |
Зеленый |
Вход Ethernet - |
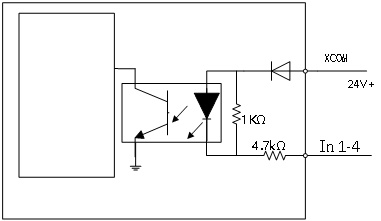
5.2.1 Подключение входного сигнала
Вход представляет собой сигнал NPN, использующий гальванически развязанный вход.
Используйте внешний блок питания: вход XC0M DC24V ± 20%, более 100 мА;
Датчик имеет 16 каналов, входные сигналы которых объединены через 4 порта ввода-вывода для переключения на указанный номер канала. Диапазон обнаружения канала необходимо предварительно установить с помощью программного обеспечения конфигурации. Внешние устройства выбирают и переключают области через входные сигналы.
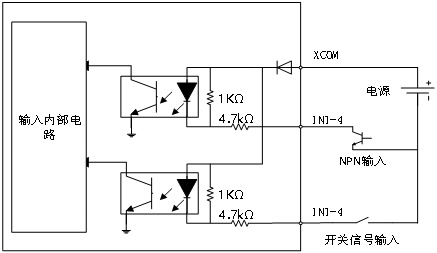
FE-датчик обеспечивает 4 входных порта для объединения сигналов.
Вкл.: Сигнал присутствует;
Выкл.: Отсутствие сигнала или обрыв цепи;
| Номер канала | IN4 | IN3 | IN2 | IN1 |
| 63 | Выкл | Выкл | Выкл | Выкл |
| 62 | Выкл | Выкл | Выкл | Вкл |
| 61 | Выкл | Выкл | Вкл | Выкл |
| 60 | Выкл | Выкл | Вкл | Вкл |
| 59 | Выкл | Вкл | Выкл | Выкл |
| 58 | Выкл | Вкл | Выкл | Вкл |
| 57 | Выкл | Вкл | Вкл | Выкл |
| 56 | Выкл | Вкл | Вкл | Вкл |
| 55 | Вкл | Выкл | Выкл | Выкл |
| 54 | Вкл | Выкл | Выкл | Вкл |
| 53 | Вкл | Выкл | Вкл | Выкл |
| 52 | Вкл | Выкл | Вкл | Вкл |
| 51 | Вкл | Вкл | Выкл | Выкл |
| 50 | Вкл | Вкл | Выкл | Вкл |
| 49 | Вкл | Вкл | Вкл | Выкл |
| 48 | Вкл | Вкл | Вкл | Вкл |
Напоминание: Если не все 16 каналов необходимы, входные сигналы могут быть определены на основе требуемого количества каналов.
Время переключения
После того, как датчик получит сигнал переключения канала, возникает задержка переключения из-за цикла сканирования. Задержка переключения показана на рисунке ниже.
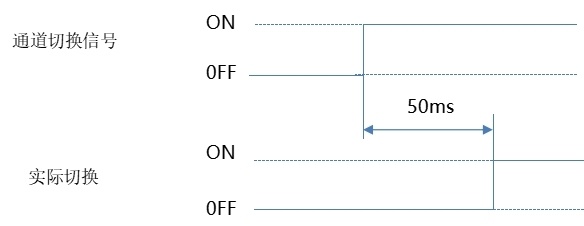
ПримечаниеПри переключении на канал без графики датчик будет продолжать контролировать состояние предыдущего графического канала;
5.2.3 Подключение выходного сигнала
Выходной сигнал использует функцию
| Порт | Функция | Выходная логика |
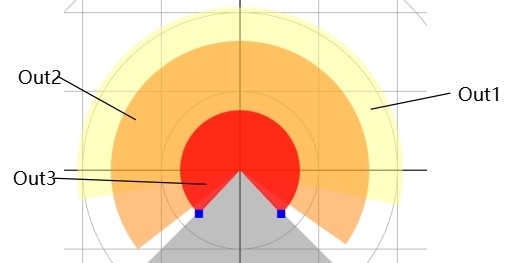
| OUT1 | Используется для дистанционного предупреждения о препятствии и замедления; | По умолчанию: нормально разомкнутый, может быть изменен на нормально замкнутый через программное обеспечение; |
| OUT2 | Используется для обычного обнаружения препятствий и остановки; | По умолчанию: нормально разомкнутый, может быть изменен на нормально замкнутый через программное обеспечение; |
| OUT 3 | Используется для аварийной остановки вблизи конца; | По умолчанию: нормально разомкнутый, может быть изменен на нормально замкнутый через программное обеспечение; |
| ERR | Используется для вывода состояния неисправности датчика; | По умолчанию: нормально разомкнутый, изменить нельзя; |
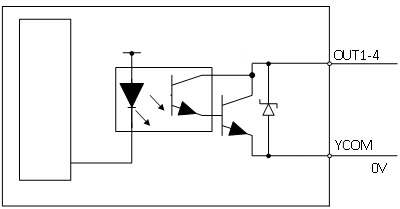
Выход представляет собой сигнал с открытым коллектором (NPN), использующий оптоизолированный выход, выходное напряжение равно 0 В, когда есть сигнал.
Все выходные порты являются выходами NPN. См. схему ниже:
|
||
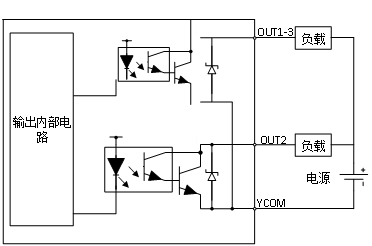
Выходные порты датчика соответствуют графическим изображениям в программном обеспечении.
|
||
| Примечание:Выход обнаружения будет происходить только тогда, когда соответствующий выход имеет нарисованный график; | ||
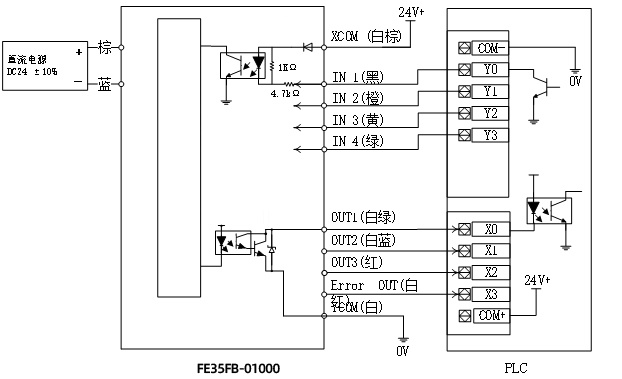
5.2.4 Схема подключения
Подключение при полной загрузке всех 16 каналов и всех выходов.
|
|
| FE35FB--01000 PLC | |
| На рисунке показан вывод сигналов верхним компьютером через NPN-трубки и прием сигналов. | |
X0-X3 — входные порты сигналов ПЛК; |
|
| Примечание:Входные и выходные порты не должны быть закорочены или подключены к нагрузкам, превышающим указанный ток, иначе это может привести к повреждению датчика. |
| Блок питания постоянного тока | Напряжение | DC10V-DC30V |
| Ток | Более 1 А | |
| Компьютер | Система | Windows 7 и выше |
| Порт | Оснащен интерфейсом RJ45 или интерфейсом сетевого кабеля USB-RJ45 | |
| Разрешение | Более 1280*720 |
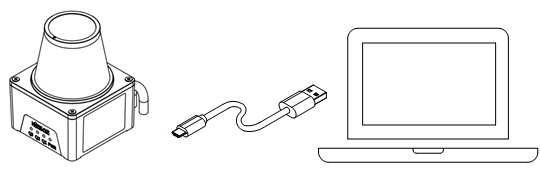
6.2 Подключение датчика и программного обеспечения для настройки
6.2.1 Откройте программное обеспечение для настройки
Разархивируйте программное обеспечение для настройки и дважды щелкните После перехода на интерфейс "Список устройств" щелкните
После перехода на интерфейс "Список устройств" щелкните Перейдите к следующему интерфейсу:
Перейдите к следующему интерфейсу:
Подключите датчик и программное обеспечение для настройки в соответствии со следующими шагами 1, 2, 3, 4.
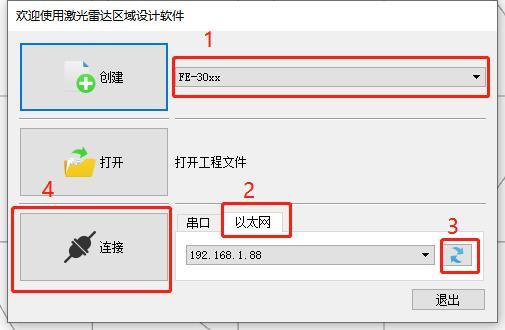
После подключения датчика к программному обеспечению для настройки отображается следующий интерфейс:
Основное меню |
Второстепенное меню |
Третичное меню |
Соответствующий значок | Примечания |
|---|---|---|---|---|
Файл |
Новый файл |
- |

|
Новый файл |
Открыть файл |
- |

|
Открыть существующий файл | |
Сохранить файл |
- |

|
Сохранить отредактированный файл | |
Сохранить как |
- |

|
Сохранить отредактированный файл как | |
Выход |
- |

|
Выход из текущего интерфейса программного обеспечения для настройки | |
Правка |
Отменить |
- |

|
Отменить последнюю операцию |
Повторить |
- |

|
Восстановить последнюю операцию | |
Копировать |
- |

|
Копировать график обнаружения определенного канала обнаружения | |
Вырезать |
- |

|
Вырезать график обнаружения определенного канала обнаружения | |
Вставить |
- |

|
Вставить график обнаружения определенного канала обнаружения в другой канал | |
Удалить |
- |

|
Удалить график выбранного канала обнаружения | |
Удалить все |
- |

|
Удалить все графики каналов обнаружения | |
Применить настройки |
- |

|
- | |
Окно |
Окно |
Правка |

|
Щелкните значок, чтобы отобразить окно редактирования функций программного обеспечения для настройки |
Мониторинг |

|
Щелкните значок, чтобы отобразить состояние мониторинга программного обеспечения для настройки | ||
Настройки датчика |

|
Щелкните значок, чтобы отобразить окно настройки параметров датчика программного обеспечения для настройки | ||
Моделирование ввода и вывода |

|
Щелкните значок, чтобы отобразить окно моделирования ввода и вывода датчика | ||
Состояние самопроверки |

|
Щелкните значок, чтобы отобразить состояние самопроверки датчика | ||
Расстояние |
- |

|
Щелкните, чтобы закрыть или отобразить текущий профиль сканирования в диапазоне 320° датчика | |
Интенсивность |
- |

|
Щелкните, чтобы закрыть или отобразить интенсивность отражения препятствий | |
Список данных |
- |

|
Программное обеспечение для настройки не поддерживает вывод данных о расстоянии для всех текущих точек обнаружения, этот пункт недоступен | |
Настройки |
Серийный порт |
- |

|
Датчик не поддерживает подключение к программному обеспечению через последовательный порт, этот пункт недоступен |
Ethernet |
- |

|
Нажмите, чтобы выбрать подключение Ethernet к программному обеспечению для настройки |
|
Настройки последовательного порта |
- |

|
Датчик не поддерживает подключение к программному обеспечению через последовательный порт, этот пункт недоступен |
|
Настройки Ethernet |
- |

|
Нажмите, чтобы просмотреть текущий Ethernet-адрес датчика |
|
|
Интерфейс |
Серийный порт |

|
Датчик не поддерживает подключение к программному обеспечению через последовательный порт, этот пункт недоступен |
|
Ethernet |
|
||
Подключить |
Подключить устройство |
- |

|
Нажмите, чтобы подключить датчик к программному обеспечению для настройки |
Отключить устройство |
- |

|
Нажмите, чтобы отключить датчик от программного обеспечения для настройки |
|
Загрузить данные |
- |

|
Нажмите, чтобы загрузить график канала обнаружения и различные установленные параметры для датчика |
|
Скачать данные |
- |

|
Нажмите, чтобы скачать график канала обнаружения и различные параметры |
|
Перезагрузить устройство |
- |

|
После настройки графика канала обнаружения и его параметров нажмите на этот значок, чтобы перезагрузить датчик и применить параметры |
|
Информация о датчике |
- |

|
- | |
Дисплей |
Графическое отображение |
- |

|
Нажмите на этот значок, чтобы отобразить 320° профиль сканирования датчика в виде плоского графика |
Отображение облака точек |
- |

|
Нажмите на этот значок, чтобы отобразить 320° профиль сканирования датчика в виде облака точек |
|
Линейное отображение |
- |

|
Нажмите на этот значок, чтобы отобразить 320° профиль сканирования датчика в виде линий |
|
Язык |
Упрощенный китайский |
- |

|
Нажмите на этот значок, чтобы отобразить программное обеспечение для настройки на китайском языке |
Английский |
- |

|
Нажмите на этот значок, чтобы отобразить программное обеспечение для настройки на английском языке |
|
Помощь |
О программе |
- |

|
Нажмите на этот значок, чтобы отобразить информацию о версии программного обеспечения для настройки |
Руководство |
- |

|
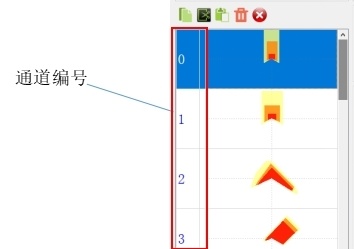
6.2.3 Кратко описываем значки
Все значки быстрого доступа описаны в Разделе 1 строки меню.
6.2.4 Редактирование графики канала обнаружения
Датчик поддерживает каналы обнаружения 0-63, каждый канал обнаружения поддерживает 3 выхода графики области обнаружения. Датчик может выбирать каналы через Ethernet и выводить, есть ли препятствия, вторгающиеся в 3 области обнаружения канала.
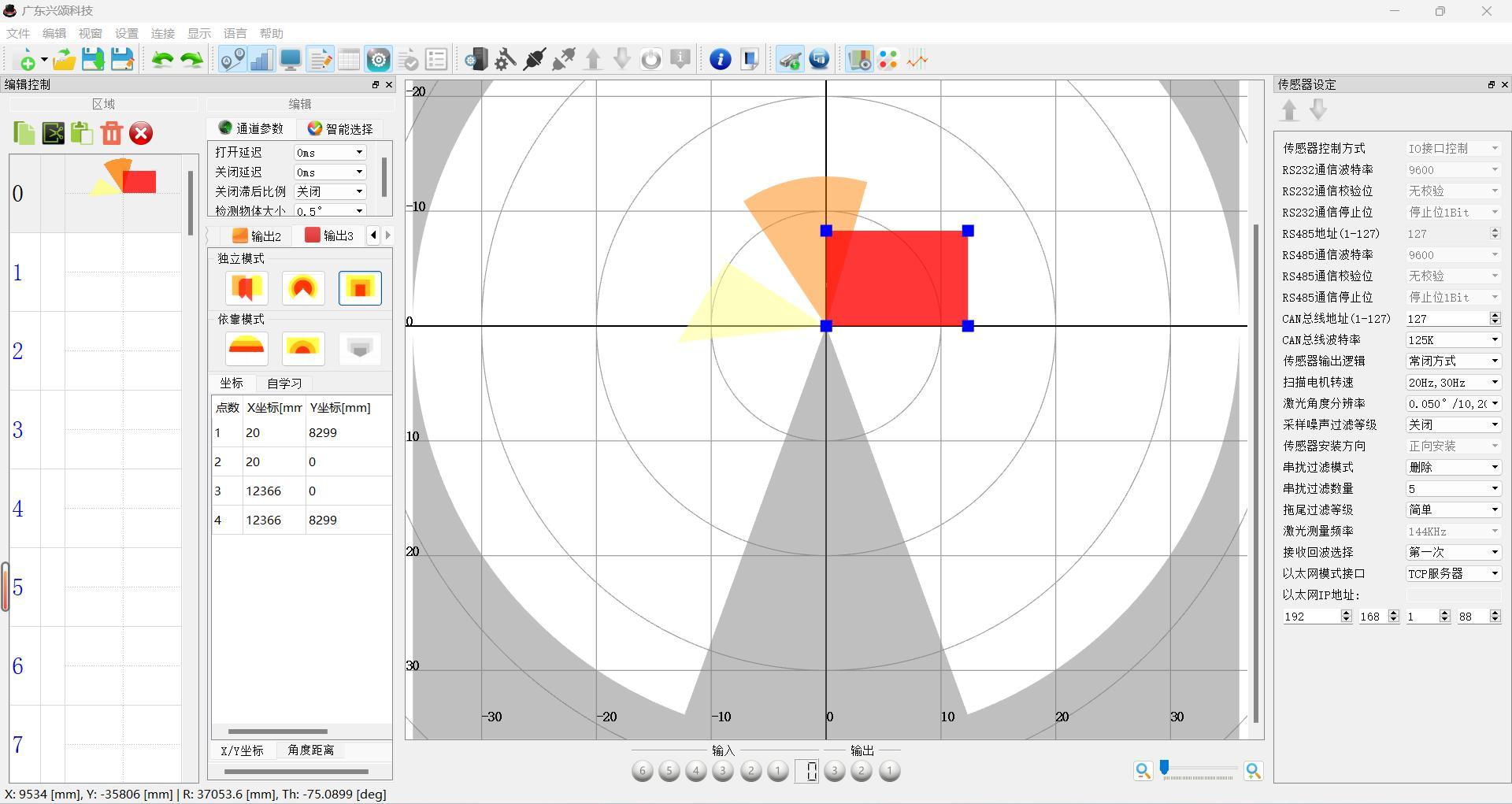
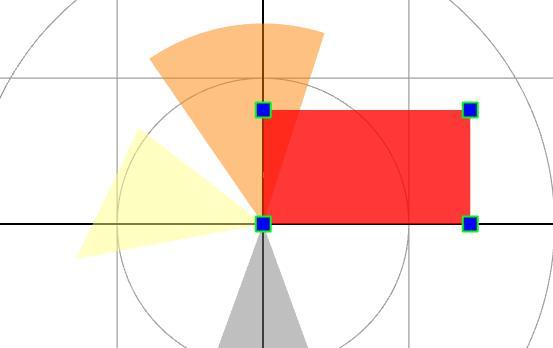
6.2.5 Редактирование вывода
Режим редактирования графического вывода канала обнаружения 1, вывода 2, вывода 3.
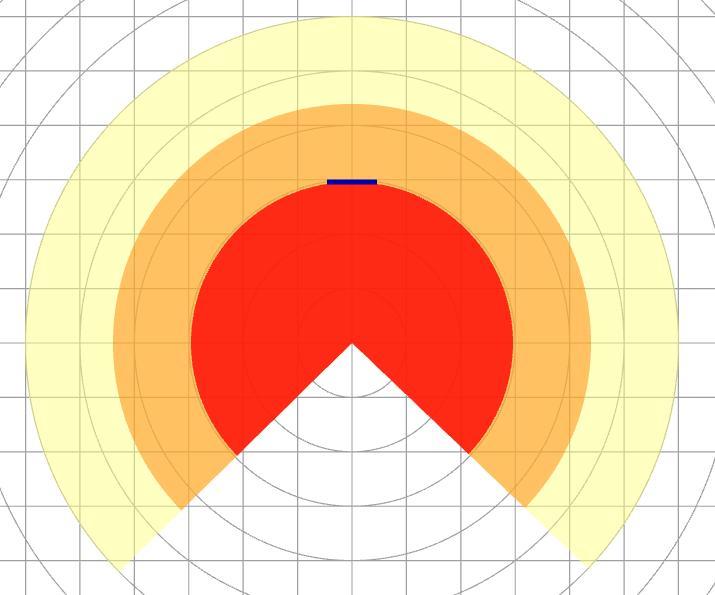
Независимый режим: В независимом режиме можно отдельно устанавливать нерегулярные формы, сектора и прямоугольники, где нерегулярные формы могут состоять из 100 соединенных точек.
Зависимый режим: После настройки графики вывода 1 вы можете выбрать зависимый режим, чтобы скопировать графику вывода 1 в разных масштабах.
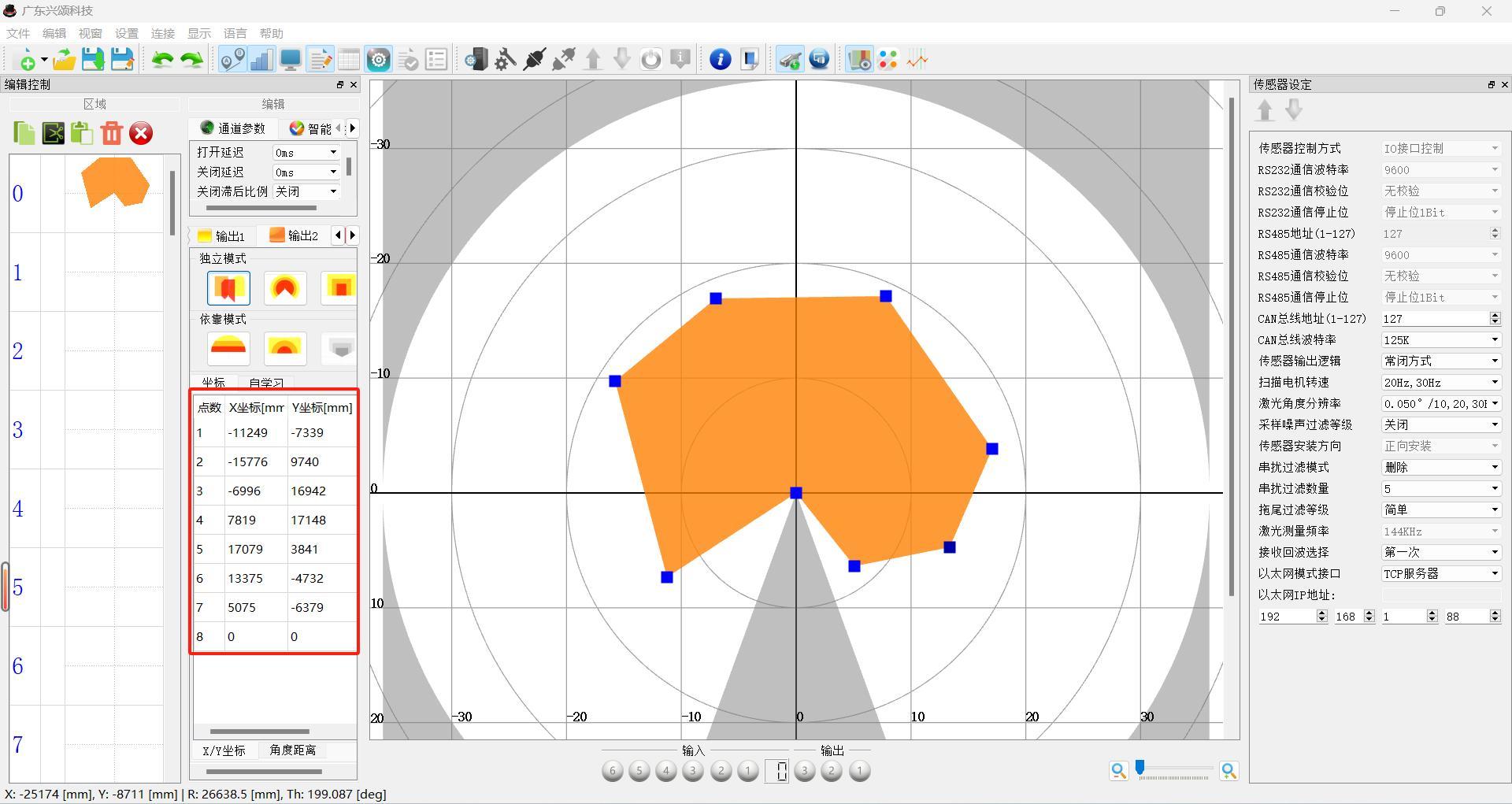
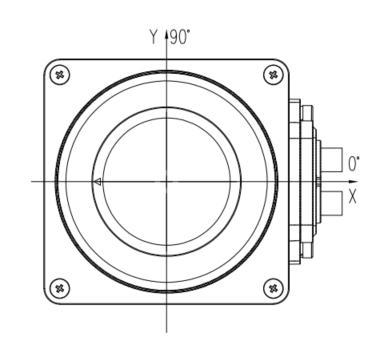
6.2.6 Координаты и значения углов
Координаты (X, Y) каждой точки нерегулярной формы в независимом режиме:
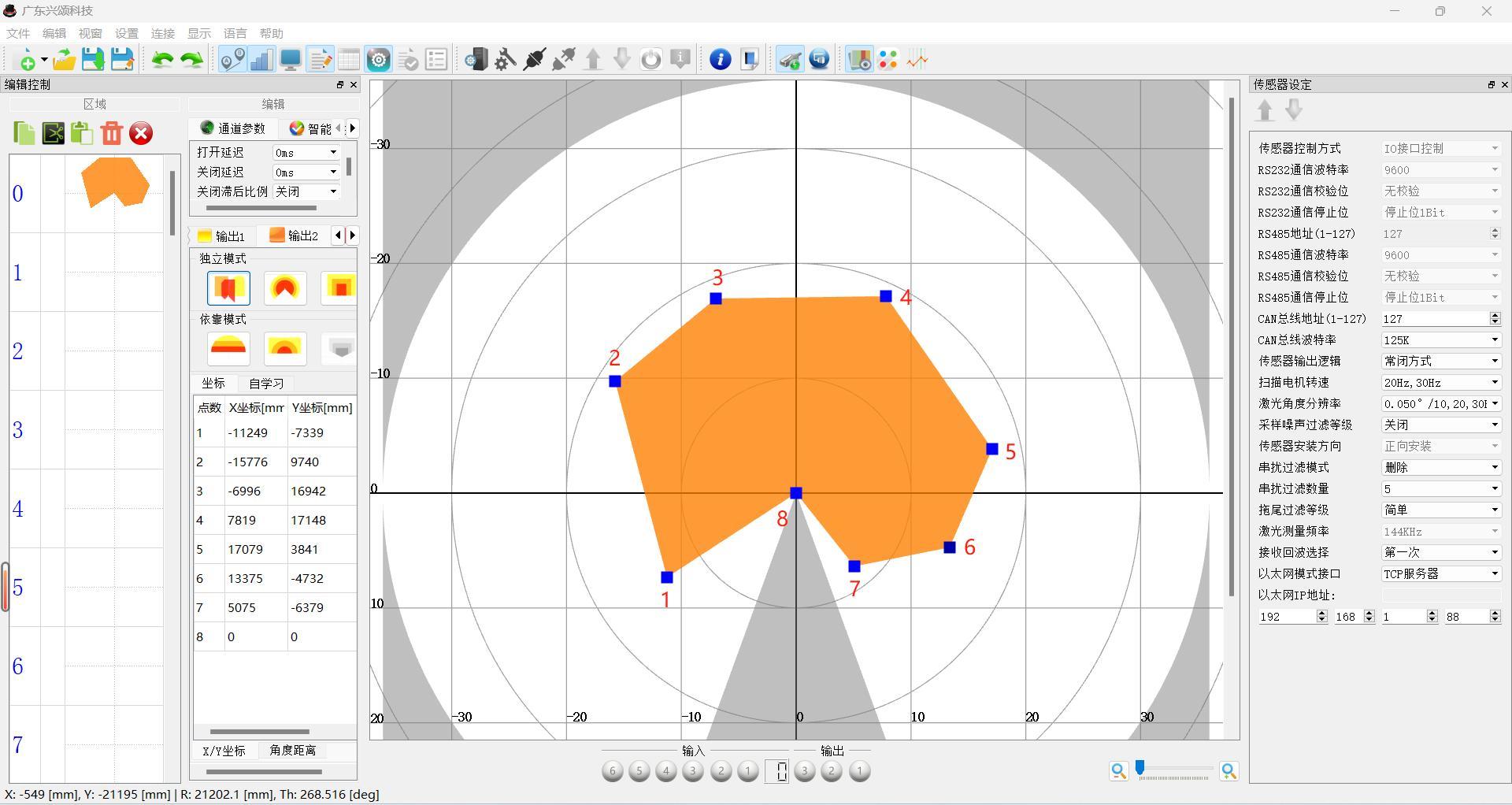
Примечание: Точка 8 является началом координат.
Расстояния и углы каждой точки нерегулярной формы от начала координат в независимом режиме:
Примечание: Точка 8 является началом координат.
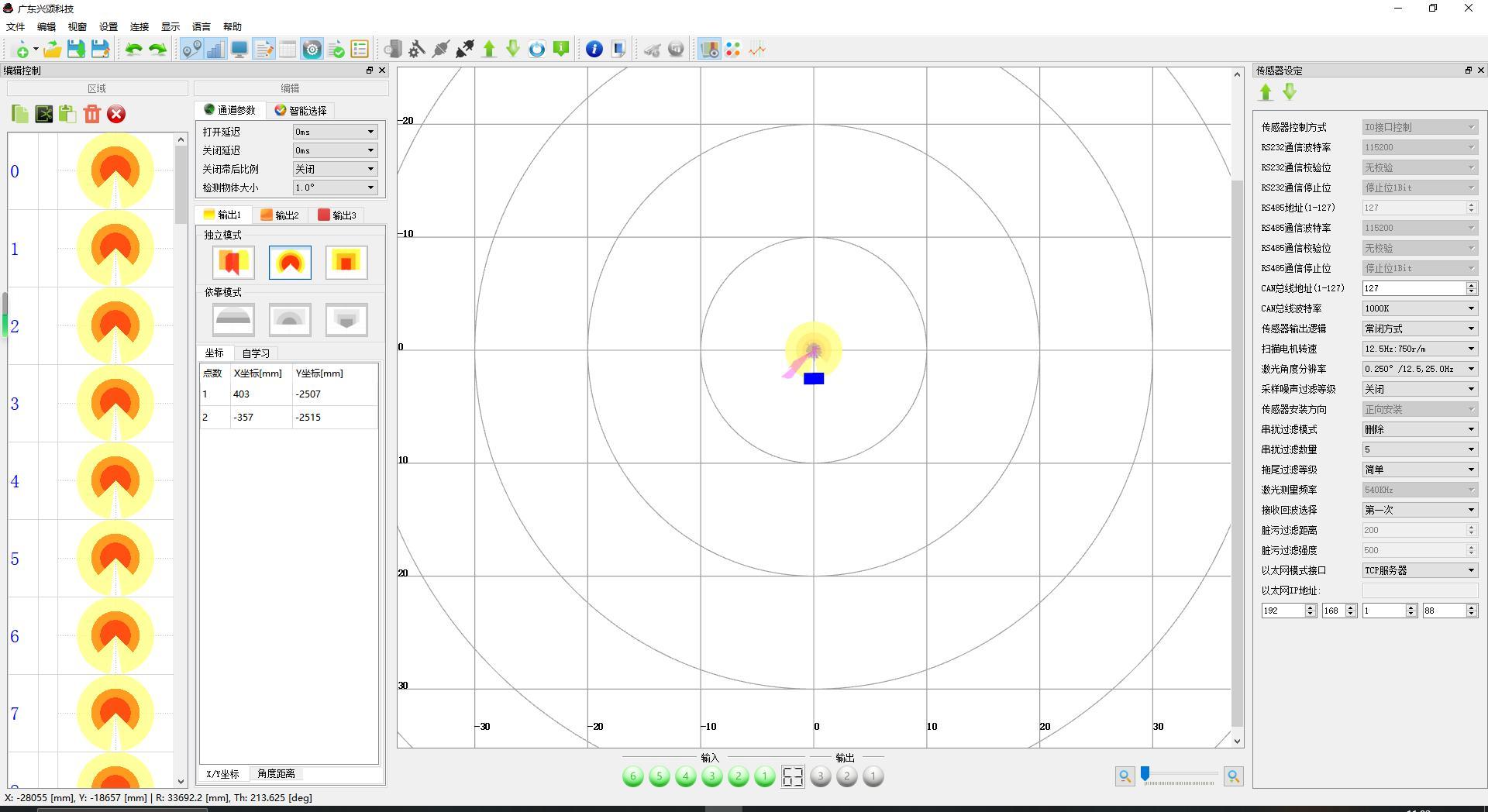
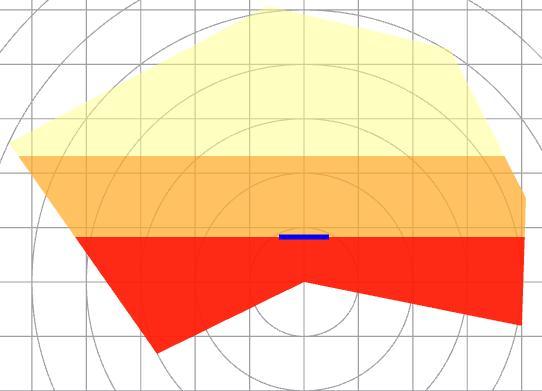
6.2.7 Отображение состояния сканирования
Профиль сканирования, интенсивность отражения, область отображения графики канала обнаружения
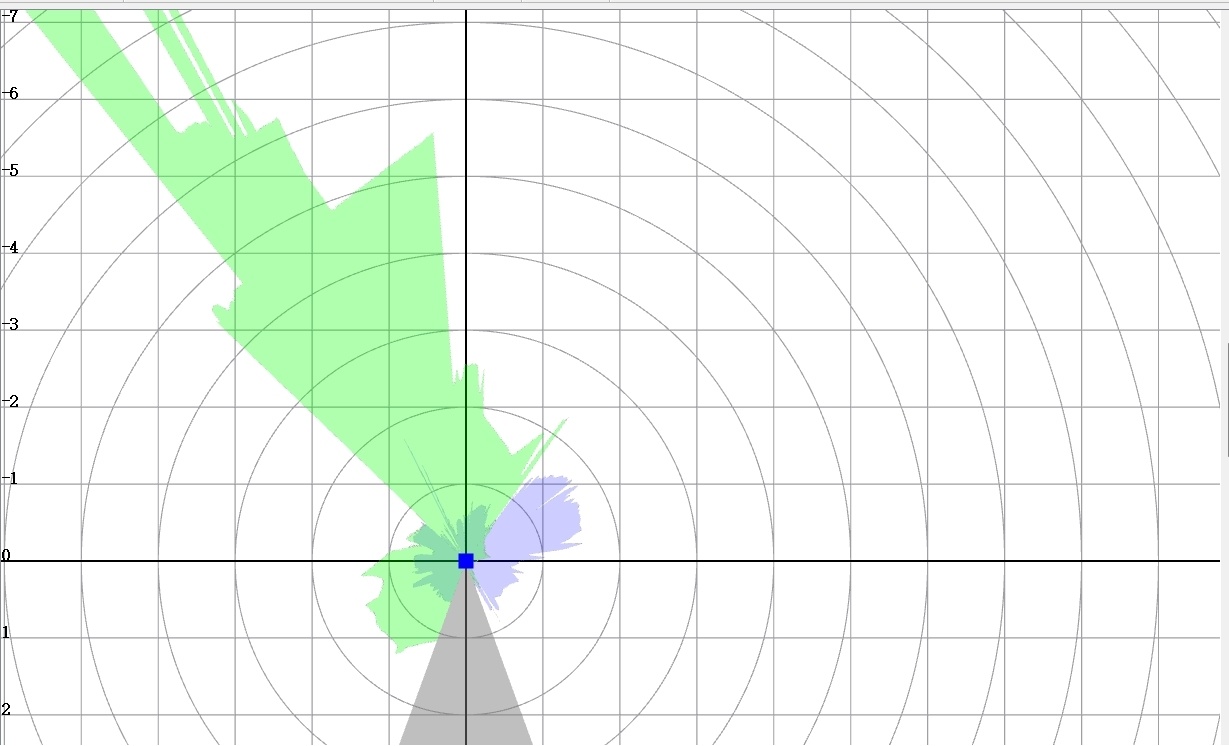
Примечание: 1 Зеленая линия обозначает профиль сканирования, 2 Синяя линия обозначает интенсивность отражения.
6.2.8 Мониторинг ввода и вывода
- 4 входа дискретного сигнала и 2 выхода дискретного сигнала
- 4 входа дискретного сигнала выбирают каналы обнаружения 48-63 (можно также указать выбранный канал через Ethernet)
- 2 дискретных сигнала выводят сигналы состояния вывода 1 и вывода 3 соответственно.
Список параметров |
Значение параметра |
Примечания |
|---|---|---|
Метод управления датчиком |
Управление интерфейсом ввода-вывода |
При выборе канала датчика выберите один из вариантов: IO, Modbus, Canopen; одновременно может быть эффективен только один, IO всегда эффективен во время вывода. |
Управление Modbus-связью |
При выборе канала датчика выберите один из вариантов: IO, Modbus, Canopen; одновременно может быть эффективен только один, IO всегда эффективен во время вывода. При выборе управления Modbus-связью, Modbus-вывод эффективен. |
|
Управление Canopen-связью |
При выборе канала датчика выберите один из вариантов: IO, Modbus, Canopen; одновременно может быть эффективен только один, IO всегда эффективен во время вывода. При выборе управления Canopen-связью, Canopen-вывод эффективен. |
|
Адрес RS485 (1-127) |
1-127 |
Можно установить адрес RS485-связи 1-127. |
Скорость передачи RS485 |
9600bps |
Установка скорости передачи RS485 |
19200bps |
||
38400bps |
||
57600bps |
||
115200bps |
||
Бит четности RS485 |
Без четности |
Установка кода четности RS485 |
Нечетная четность |
||
Четная четность |
||
Стоповый бит RS485 |
1 бит |
Установка стопового бита RS485 |
1.5 бита |
||
2 бита |
||
Адрес CAN-шины (1-127) |
1-127 |
Можно установить адрес связи CAN от 1 до 127. |
Скорость передачи данных по шине CAN |
125K |
Скорость передачи данных по шине CAN |
250K |
||
500K |
||
1000K |
||
Логика выходного сигнала датчика |
Режим нормально разомкнутого |
Настройка нормально разомкнутого/нормально замкнутого выхода датчика |
Режим нормально замкнутого |
||
Разрешение угла лазера |
0,025°/12,5 Гц 0,050°/12,5, 25 Гц 0,100°/12,5, 25, 50 Гц 0,200°/50 Гц 0,250°/12,5, 25 Гц 0,500°/12,5, 25, 50 Гц |
Разрешение по умолчанию 0,250° |
Уровень фильтрации шума |
Выкл. Простой
Средний
Строгий |
Настройка уровня фильтрации шума, по умолчанию выключено |
Направление установки датчика |
Прямая установка |
Параметр в настоящее время не эффективен |
Режим фильтрации перекрестных помех |
Выкл. Подгонка Удалить |
Удаление по умолчанию. Включить предотвращение помех для других датчиков |
Количество точек фильтрации перекрестных помех |
3-8 |
По умолчанию 5, количество точек фильтрации; чем больше точек фильтрации, тем лучше эффект подавления помех, но будут некоторые искажения в крайних частях изображения. |
Уровень фильтрации остаточных сигналов |
Выкл. Простой
Средний
Строгий |
Настройка уровня фильтрации остаточных сигналов, по умолчанию простой |
Частота измерений лазером |
540KHz |
Частота измерений датчика, этот параметр в настоящее время нельзя изменить |
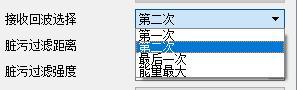
Выбор эха |
Первый раз Второй раз Последний раз Максимальная энергия |
Первый раз: нормальный режим, функция фильтрации отсутствует Второй раз: выбор второго эха, с функцией фильтрации Последний раз: выбор последнего эха, с функцией фильтрации Максимальная энергия: выбор эха с максимальной энергией, с функцией фильтрации По умолчанию первый раз |
Дистанция фильтрации грязи |
0-2000 |
Настройка дистанции фильтрации грязи, по умолчанию 200 |
Интенсивность фильтрации грязи |
0-2000 |
Настройка дистанции фильтрации грязи, по умолчанию 200 |
Интерфейс режима Ethernet |
TCP-сервер | TCP-сервер по умолчанию |
Режим UDP |
||
IP-адрес Ethernet |
Настройка IP-адреса датчика |
6.2.10 Настройки многократного эха (для FE35FB-XXXXX)
|
|
Первый раз |
Нормальный режим, функция фильтрации отсутствует |
Второй раз |
Выбор второго эха, с функцией фильтрации (рекомендуемый вариант функции эха) |
Последний раз |
Выбор последнего эха, с функцией фильтрации |
Максимальная энергия |
Приём эха с максимальной энергией |
Примечание: В случае использования нескольких лазеров, использование функции многократного эха и выбор удаления режима фильтрации перекрестных помех приведет к исчезновению некоторых точек облака на изображении. Пожалуйста, не используйте указанные функции одновременно. |
|
|
|
|
7.2.1 Фильтрация окружающей среды и минимальное расстояние
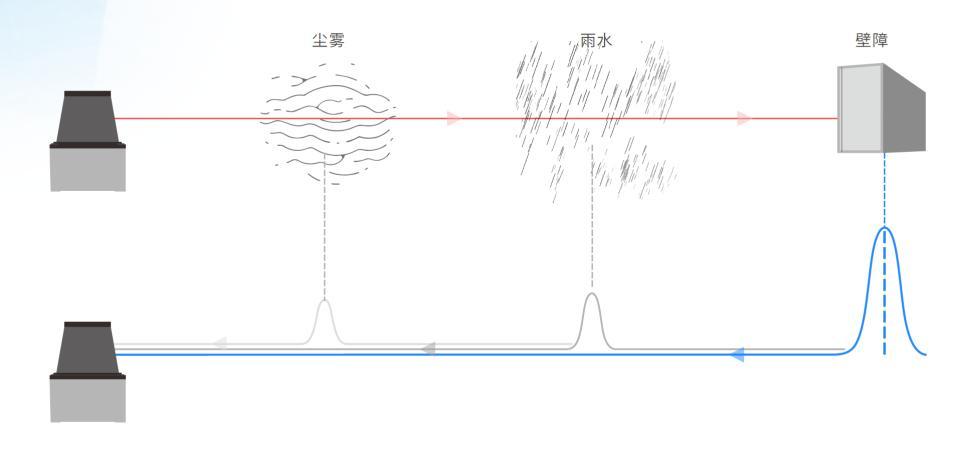
Технология многократного эха может обнаруживать несколько сигналов эха для каждого измерительного луча, таким образом, идентифицируя эхо-сигналы, вызванные дождем, пылью или сложными структурами во время цикла работы излучаемого луча, и фильтруя их при необходимости.
Для отображения эхо-сигналов в виде отдельных значений измерений, между двумя объектами должно быть минимальное расстояние около 2,5 м.
7.2.2 Влияние поверхностей объектов на измерения
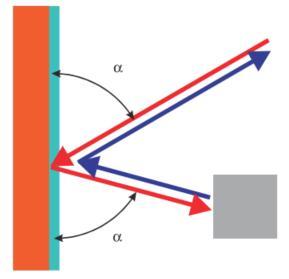
● Гладкие отражающие поверхности
Гладкие отражающие поверхности не могут быть обнаружены, но объекты, освещенные отраженным светом от гладких отражающих поверхностей, могут быть обнаружены.
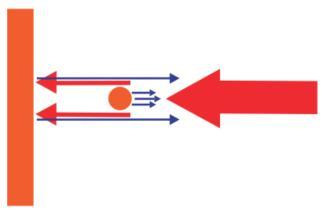
● Обнаружение маленьких объектов или отсутствие объектов
Если обнаруженный объект меньше диаметра луча, то это может быть связано с тем, что
① Поверхность малого объекта отражает недостаточно, и нет фоновых объектов, поэтому его невозможно обнаружить;
② Малый объект отражает недостаточно, но фоновый объект отражает достаточно, что приводит к ошибкам обнаружения;
③ И малый объект, и фоновый объект отражают достаточно, что приводит к искаженным значениям измерений;
7.3 Передача данных по Ethernet
◆ Настройки параметров
Откройте программное обеспечение конфигурации, перейдите к интерфейсу настройки датчика (сторона сервера) и установите следующие параметры.

|
Название параметра |
Значение параметра |
Значение по умолчанию |
Режим Ethernet |
TCP-сервер |
TCP-сервер |
|
Режим UDP |
|||
IP-адрес Ethernet |
192.168.1.1-254
Последний байт может быть установлен от 1 до 254 Порт датчика (сервера) зафиксирован на 8080 |
192.168.1.88 |
После того, как клиент инициирует запрос и устанавливает соединение, начинается передача данных, следуя следующим правилам:
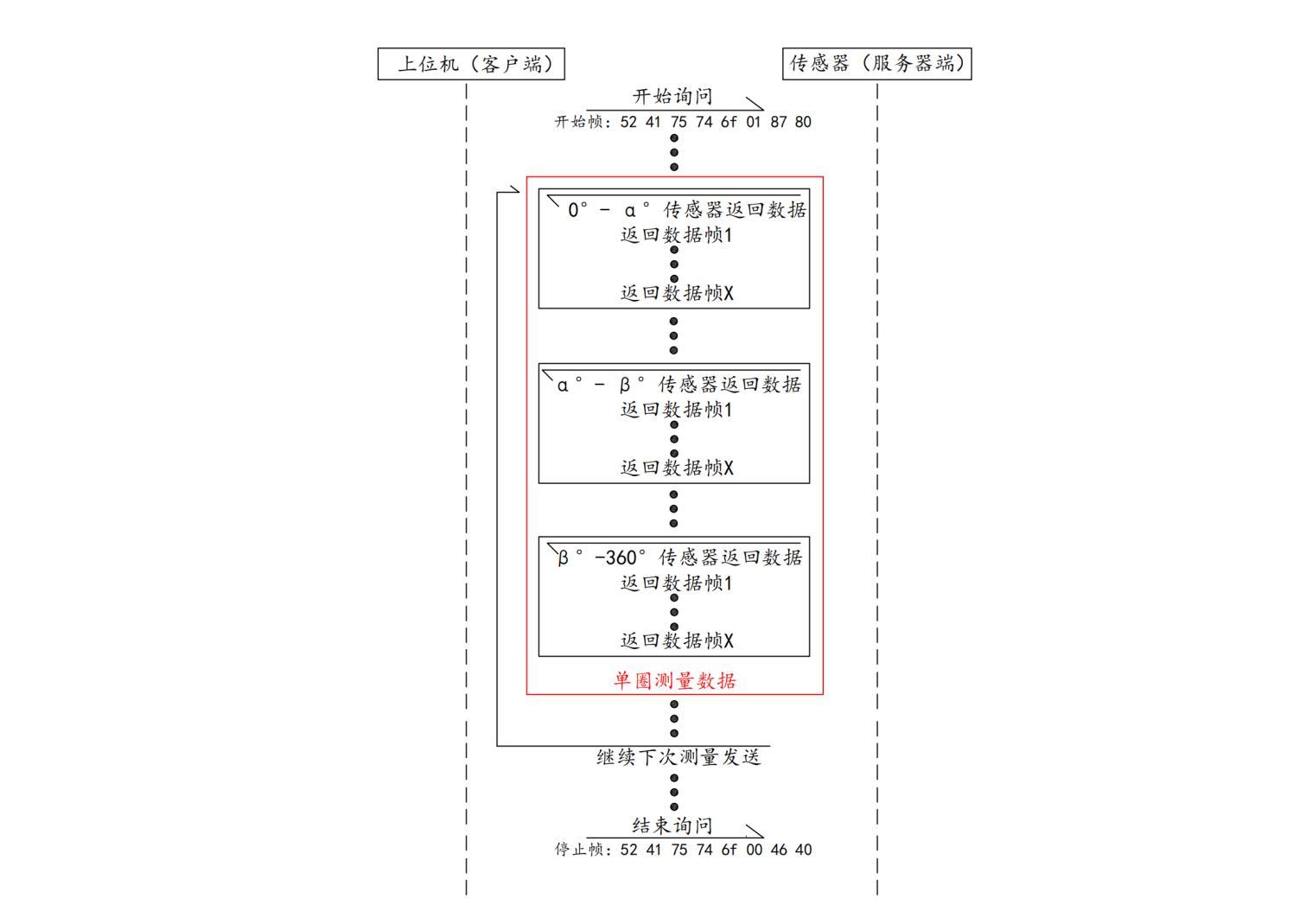
Хост-компьютер (клиент) отправляет кадр запуска данных на датчик (серверная сторона), а датчик возвращает данные измерений для 0°-360° в нескольких кадрах. После возврата полных данных измерений для 0°-360° (всего 360°), датчик продолжает отправлять следующие данные измерений, пока не получит кадр остановки данных, отправленный хост-компьютером.
- Кадр запуска данных (Hex)
Структура данных
Стартовый код
|
Контрольный бит
|
Контрольная сумма
|
5Byte
|
1Byte
|
2Byte
|
Стартовый код:Фиксированные данные0x52 0x41 0x750x740x6F
Контрольный бит:
0x01Датчик начинает автоматически отправлять данные;
0x00Датчик прекращает отправку данных;
Контрольная сумма:Младший байт первым, старший байт последним, используя Modbus-CRC16Контрольная сумма, вычисленная указанным методом.
- Кадр данных измерений (Hex)
Структура данных:
Заголовок кадра данных
|
Данные измерений
|
16Byte
|
Переменная длина
|
Формат заголовка кадра данных (Hex):
Идентификатор
|
1Byte
|
1Byte
|
|
1Byte
|
|
1Byte
|
|
Начальный угол
|
1 байт (старший байт первым)
|
1 байт (младший байт последним)
|
|
Конечный угол
|
1 байт (старший байт первым)
|
1 байт (младший байт последним)
|
|
Общее количество точек измерения в текущем кадре данных
|
1 байт (старший байт первым)
|
1 байт (младший байт последним)
|
|
Порядковый номер последней точки обнаружения в текущем кадре данных
|
1 байт (старший байт первым)
|
1 байт (младший байт последним)
|
|
Общее количество точек измерения от начального до конечного угла
|
1 байт (старший байт первым)
|
1 байт (младший байт последним)
|
|
Пометка времени
|
1 байт (старший байт первым)
|
1 байт (младший байт последним)
|
1. Идентификатор (4Byte): 0x48 0x49 0x53 0x4e
2. Начальный угол (2Byte): Начальный угол текущих возвращаемых данных измерений;
3. Конечный угол (2Byte): Конечный угол текущих возвращаемых данных измерений;
4. Общее количество точек измерения в текущем кадре данных (2Byte):
Из-за различного разрешения углов общее количество точек измерения в диапазоне от начального до конечного угла также будет варьироваться. Данные измерений будут возвращены в нескольких кадрах данных в этом диапазоне. "Общее количество точек измерения в текущем кадре данных" - это сумма точек измерения, возвращенных в текущем кадре данных.
5. Порядковый номер последней точки обнаружения в текущем кадре данных (2Byte):
Например: общее количество точек измерения от начального до конечного угла800разделено на 2 кадра для возврата данных измерений. Текущий кадр данных возвращает данные для точек с 1 по400тогда значение "порядкового номера последней точки обнаружения в текущем кадре данных" равно400если текущий кадр данных возвращается с точки401по800тогда значение "порядкового номера последней точки обнаружения в текущем кадре данных" равно800.
6. Общее количество точек измерения в диапазоне от начального до конечного угла (2Byte):
Общее количество точек измерения в диапазоне от начального до конечного угла определяется текущей частотой сканирования лазера, скоростью вращения сканирующего двигателя и количеством выборок одной точки.
Далее будут приведены примеры.
7. Пометка времени (2Byte):
Отображает внутреннее время текущего отправленного кадра, единица времени - мкс, диапазон записи времени - 0-65535 мкс, данные очищаются после заполнения записи.
Данные измерений (Hex):
Данные измерения первой точки (4 байта) |
Данные измерения второй точки (4 байта) |
………………… (4 байта) |
Данные измерения последней точки (4 байта) |
||||||||||||
Расстояние измерения (2 байта) |
Интенсивность измерения (2 байта) |
Расстояние измерения (2 байта) |
Интенсивность измерения (2 байта) |
Расстояние измерения (2 байта) |
Интенсивность измерения (2 байта) |
Расстояние измерения (2 байта) |
Интенсивность измерения (2 байта) |
||||||||
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
Единица измерения расстояния - мм, выводятся данные о расстоянии между точкой отражения и датчиком.
Интенсивность измерения отражает интенсивность точки отражения, при этом более высокие значения указывают на более высокую способность объекта к отражению.
И расстояние измерения, и интенсивность измерения - младший байт первым, старший байт последним.
- Кадр остановки данных (Hex)
0x52 0x41 0x75 0x74 0x6F 0x00 0x46 0x40
После того, как хост-компьютер отправит на датчик кадр остановки данных, датчик прекратит возвращать данные измерений.
- Пример пояснения
1. Параметры датчика установлены следующим образом:
Интерфейс в режиме Ethernet: TCP-сервер
IP-адрес Ethernet: 192.168.1.88
Скорость вращения сканирующего двигателя: 12,5 Гц
Порт датчика (сервера): 8080
Важно отметить, что порт датчика (сервера) фиксирован на 8080, и хост-компьютер успешно устанавливает соединение с датчиком..
2. Расчет разрешения угла измерения:
Частота сканирования лазера: количество лазерных лучей, излучаемых лазерным излучателем за одну секунду, например, 432 кГц;
Скорость вращения сканирующего двигателя: количество оборотов вращающегося двигателя излучающей трубки лазера в секунду, например, 12,5 Гц (12,5 об/с);
Время дискретного отбора проб: количество повторных измерений в одной точке измерения. Пример: измерение одной точки обнаружения;1times;
Разрешение угла измерения = скорость вращения сканирующего двигателя * 360° / (частота сканирования лазера / время дискретного отбора проб) =0.100°, разрешение угла измерения автоматически рассчитывается программным обеспечением конфигурации и не требует отдельной настройки;
3. Расчет общего количества точек измерения:
Общее количество точек измерения = (конечный угол - начальный угол) / разрешение угла измерения, общее количество точек измерения округляется до одного десятичного знака и, согласно конструкции датчика, делится на 13 блоков данных углового диапазона. Это значение углового диапазона является фиксированным и не изменяется при изменении разрешения угла. См. рисунок 4 ниже.
Первый начальный угол
|
Первый конечный угол
|
Угловой диапазон
|
Второй начальный угол
|
Второй конечный угол
|
Угловой диапазон
|
Третий начальный угол
|
Третий конечный угол
|
Угловой диапазон
|
Четвертый начальный угол
|
Четвертый конечный угол
|
Угловой диапазон
|
24°
|
48°
|
24°
|
48°
|
72°
|
24°
|
72°
|
96°
|
24°
|
96°
|
120°
|
24°
|
Пятый начальный угол
|
Пятый конечный угол
|
Угловой диапазон
|
Шестой начальный угол
|
Шестой конечный угол
|
Угловой диапазон
|
Седьмой начальный угол
|
Седьмой конечный угол
|
Угловой диапазон
|
Восьмой начальный угол
|
Восьмой конечный угол
|
Угловой диапазон
|
120°
|
144°
|
24°
|
144°
|
168°
|
24°
|
168°
|
192°
|
24°
|
192°
|
216°
|
24°
|
Девятый начальный угол
|
Девятый конечный угол
|
Угловой диапазон
|
Десятый начальный угол
|
Десятый конечный угол
|
Угловой диапазон
|
Одиннадцатый начальный угол
|
Одиннадцатый конечный угол
|
Угловой диапазон
|
Двенадцатый начальный угол
|
Двенадцатый конечный угол
|
Угловой диапазон
|
216°
|
240°
|
24°
|
240°
|
264°
|
24°
|
264°
|
288°
|
24°
|
288°
|
312°
|
24°
|
Тринадцатый начальный угол
|
Тринадцатый конечный угол
|
Угловой диапазон
|
|
|
|
|
|
|
|
|
|
312°
|
336°
|
24°
|
|
|
|
|
|
|
|
|
|
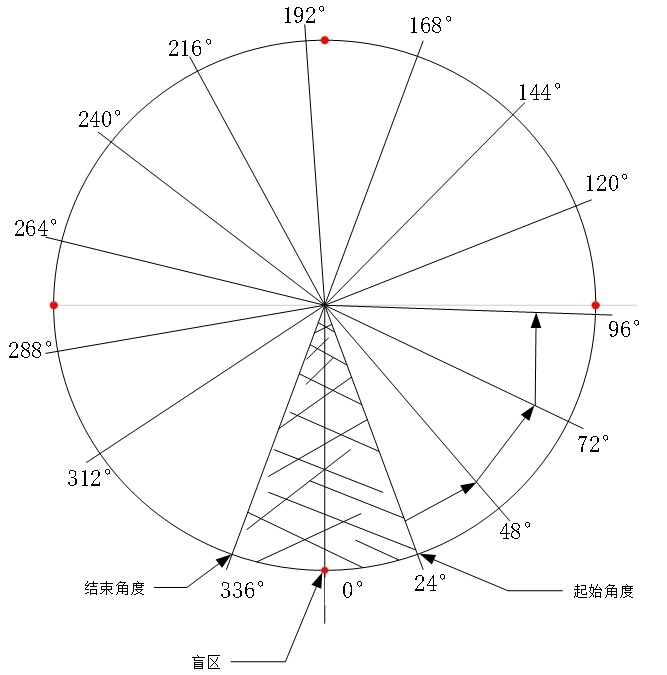
Например, если конечный угол равен 24°, начальный угол равен 0°, а разрешение угла равно 0,100°, общее количество точек измерения = (24-0) / 0,100 = 240.
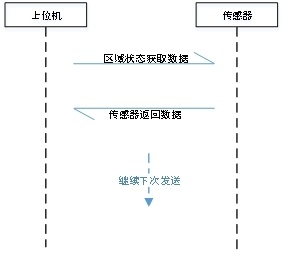
Состояние датчика и сбор данных о детектировании области
После инициирования запроса и установления соединения на стороне клиента начинается передача данных, следуя правилам ниже.
Отправка данных сбораСообщение
Идентификатор данных
|
5Byte
|
Режим работы датчика |
1Byte
|
Значение канала датчика
|
1Byte
|
Значение угла переключения в режиме интеллектуального выбора канала
|
2Byte
|
Значение скорости переключения в режиме интеллектуального выбора канала
|
2Byte
|
Номер группы каналов
|
2Byte
|
Бит недействительных данных
|
3Byte
|
Контрольная сумма
|
2Byte
|
- Идентификатор данных (5байт)
Идентификатор фиксированныйДанные:0x57 0x53 0x69 0x6d 0x75Функция этих данных;
- Режим работы датчика (1байт)
00: Неверная команда
01: Режим назначенного канала
02: Режим интеллектуального выбора канала
- Значение канала датчика (1байт)
Управление текущим каналом измерения, используемым датчиком, диапазон данных 00-63;
- Угол канала датчика (2байт)
Значение угла в режиме группового канала, данные находятся в диапазоне со знаком от -180 до 180;
- Значение скорости канала датчика (2байт)
Значение скорости в режиме группового канала, данные находятся в диапазоне со знаком -300-300;
- Номер группы каналов датчика (2байт)
Управление текущим используемым номером группы каналов измерения датчика, диапазон данных 00-04;
- Недействительные данные (3байт)
Недействительные данные, должны быть отправлены данные по умолчанию0x00;
- Контрольная сумма (2 байта)
Контрольная сумма данных, используется метод modbus младший байт первым CRC16Метод проверки. Контрольное значение вычисляется с использованием формулы проверки, конкретные методы расчета см. в приложении.
Возвращаемые данные датчика
Идентификатор данных
|
5Byte
|
Значение канала датчика
|
1Byte
|
Недействительно
|
1Byte
|
Статус вывода
|
1Byte
|
Недействительные данные
|
1Byte
|
Статус неисправности
|
1Byte (H)
|
|
1Byte (L)
|
Текущая температура
|
1Byte
|
|
1Byte
|
Внутренняя скорость двигателя
|
1Byte (H)
|
|
1Byte (L)
|
Напряжение питания
|
1Byte (H)
|
|
1Byte (L)
|
Приемное напряжение
|
1Byte (H)
|
|
1Byte (L)
|
Выходное напряжение
|
1Byte (H)
|
|
1Byte (L)
|
Контрольная сумма
|
1Byte (L)
|
|
1Byte (H)
|
- Идентификатор данных (5байт)
Идентификатор фиксированныйДанные:0x57 0x53 0x69 0x6d 0x75Функция этих данных;
- Текущее значение канала (1 байт)
Текущее значение канала датчика;
- Недействительные данные (1байт)
Недействительные данные;
- Статус вывода (1байт)
Bэто7 |
Bэто6 |
Bэто5 |
Bэто4 |
Bэто3 |
Bэто2 |
Bэто1 |
Bэто0 |
Недействительно
|
OUT 3 |
OUT2 |
OUT1 |
||||
Связано с настройками параметровЛогика выходного сигнала датчика:
Режим нормально разомкнутого состояния (по умолчанию)
00: Объект обнаружен;
01: Объект не обнаружен
Режим нормально разомкнутого
01: Объект обнаружен;
00: Объект не обнаружен;
- Недействительные данные (1байт)
Недействительные данные;
- Статус неисправности датчика (2байт)
|
||||||||||||||||||||||||||
Код неисправности датчика
|
- Текущая температура (2байт)
|
||||
Знаковое число, диапазон данных -5000-10000; отображает текущую внутреннюю температуру датчика, единица измерения температуры 0,01℃; когда контролируемая температура превышает 80,00℃, датчик указывает на защиту от перегрева;
|
||||
- Внутренняя скорость двигателя (2байт)
|
||||
Беззнаковое число, диапазон данных 0-3000, отображает текущую внутреннюю скорость двигателя датчика, единица измерения скорости 1 об/мин;
|
||||
- Напряжение привода (2байт)
|
||||
Беззнаковое число, диапазон данных 0-1600; отображает текущее напряжение двигателя привода датчика, единица измерения напряжения 0,01 В;
|
||||
- Напряжение приемной платы (2байт)
|
||||
Беззнаковое число, диапазон данных 0-25000; отображает текущее напряжение ADP приемной платы датчика, единица измерения напряжения 0,01 В;
|
||||
- Напряжение передающей платы (2байт)
|
||||
Беззнаковое число, диапазон данных 0-5500; отображает текущее напряжение передающей платы датчика, единица измерения напряжения 0,01 В;
|
||||
- Контрольная сумма (2 байта)
Контрольная сумма данных, используется метод modbus младший байт первым CRC16Метод проверки. Контрольная сумма вычисляется по контрольной формуле.
cBuffer: Массив для вычисления контрольного кода CRC.
iBufLen: Длина массива.
unsigned int CRC_Verify(unsigned char *cBuffer, unsigned int iBufLen)
{
unsigned int i, j; //#define wPolynom 0xA001
unsigned int wCrc = 0xffff;
unsigned int wPolynom = 0xA001;
/*---------------------------------------------------------------------------------*/
for (i = 0; i < iBufLen; i++)
{
wCrc ^= cBuffer[i];
for (j = 0; j < 8; j++)
{
if (wCrc &0x0001)
{ wCrc = (wCrc >> 1) ^ wPolynom; }
else
{ wCrc = wCrc >> 1; }
}
}
return wCrc;
}
Для клиентов, использующих датчики в среде ROS, могут использоваться предоставленные специальные драйверы. Пакет драйверов ROS можно получить следующим образом:
Посетите: www.hinson-xs.com |
Свяжитесь с сотрудниками отдела продаж и технической поддержки Hinson |
Посетите Gitee:https://gitee.com/hinson-xs/hins_he_driver.git
|
Если датчик работает неисправно или состояние датчика не может быть определено, обратитесь к следующей таблице для диагностики и подтверждения неисправности.
Лазерный датчик указывает на неисправность с помощью мигания светодиода:
Мигание светодиода (раз) |
Описание неисправности |
0 |
Нормальное состояние датчика
|
1 |
Ошибка сигнала энкодера датчика
|
2 |
Нет сигнала приемной платы
|
3 |
Ошибка данных памяти
|
4 |
Ошибка соединения
|
5 |
Ошибка симуляции
|
6 |
Защита от перегрева
|
7 |
Защита от пониженного напряжения отправки
|
8 |
Защита от повышенного напряжения отправки
|
9 |
Защита от пониженного напряжения привода
|
10 |
Защита от повышенного напряжения привода
|
11 |
Защита от пониженного напряжения приема
|
12 |
Защита от повышенного напряжения приема
|
9.1 Гарантийный срок
* Датчик имеет ограниченную гарантию. В течение гарантийного срока, если продукт не может использоваться нормально из-за проблем с качеством или дефектов конструкции, мы предоставим бесплатное послепродажное обслуживание.
* Гарантийный срок: 2 года с даты продажи.
* Продукты, находящиеся в гарантийный период и соответствующие гарантийным условиям, будут отремонтированы или заменены бесплатно.
* Гарантия и послепродажное обслуживание этого продукта ограничены материковым Китаем;
* Продукты, которые не могут нормально использоваться из-за повреждений во время транспортировки;
* Продукты, которые не могут нормально работать из-за повреждения самих компонентов;
* Продукты, которые не могут нормально использоваться из-за дефектов конструкции;
9.3 Объем исключений
* Обратите внимание на следующие условия при использовании продукта; мы не будем предоставлять бесплатное послепродажное обслуживание и гарантию.
* Повреждения, вызванные неправильной установкой продукта в соответствии с руководством;
* Повреждения, вызванные использованием продукта в неподходящих условиях окружающей среды;
* Повреждения, вызванные несоблюдением технических характеристик продукта, указанных в руководстве;
* Несанкционированная разборка или ремонт продукта без разрешения компании;
* Повреждения, вызванные стихийными бедствиями, пожарами и другими непреодолимыми внешними силами.
9.4 Техническая поддержка
При возникновении неразрешимых неисправностей, пожалуйста, свяжитесь с нами следующим образом.
Телефон: +86-757-22218956
Электронная почта: lixianjiao@hinson-xs.com
Веб-сайт компании:www.hinson-xs.com
Производитель: Guangdong Hinson Technology Co., Ltd.
Содержание
1.1. Меры предосторожности, касающиеся среды применения
1.2. Меры предосторожности, касающиеся среды подключения
1.3. Меры предосторожности, касающиеся среды отладки
4.3. Описание индикаторных ламп
5.1. Порты питания и количества переключателей
5.2. Подключения входных и выходных сигналов
5.2.1. Подключение входного сигнала
5.2.3. Проводка выходного сигнала
6.2. Подключение датчика и программного обеспечения для настройки
6.2.1. Открыть программное обеспечение для настройки
6.2.3. Значок быстрого доступа
6.2.4. Редактирование графики канала обнаружения
6.2.6. Координаты и их значения углов
6.2.7. отображение состояния сканирования
6.2.8. Мониторинг ввода и вывода
6.2.10. Настройки многоэхового режима (только для FE-XXXXXFA)
7.1. Система координат датчика
7.2.1. Фильтрация окружающей среды и минимальное расстояние
7.2.2. Влияние поверхности объекта на измерение
8.1 Диагностика неисправностей
Решения для вашей отрасли, готовые к вашему выбору

Hinson
Guangdong Hinson Technology Co., Ltd.
Поддержка клиентов, чтобы стать лидерами отрасли
Поставщик решений для измерения и управления промышленной автоматизацией
Публичный номер WeChat
Бизнес консалтинг
Горячая линия обслуживания
Строя 8, сад Шенгюе, дорога 33 Шунье восточная, городок Синтан, район Шунде, город Фошан, провинция Гуандун
(Промышленный парк машин Шунде)